Contenidos (RD 875/2014)
| Unidad teórica 3. | Teoría de navegación |
| 1. Esfera terrestre | -Ejes, polos, ecuador, meridianos y paralelos. -Trópicos y círculos polares. -Meridiano cero y del lugar. -Latitud y longitud. |
| 2. Corrección total | Definición. Cálculo por: -Declinación magnética y desvío del compás. -La polar -Enfilaciones u oposiciones. |
| 3. Rumbos | Verdadero, de superficie y efectivo. Abatimiento y deriva Rumbo de aguja |
| 4. Publicaciones náuticas | Avisos a los navegantes. Correcciones de las cartas y derroteros. |
| 5. Medida del tiempo | Definición (sin cálculo): -Tiempo universal, hora civil del lugar, hora legal, hora oficial y hora reloj bitácora. |
| 6. Radar | Concepto y usos. Ajuste de visualización (sintonía, ganancia, perturbaciones de mar y lluvia). Distancias y marcaciones (conversión a demora) |
| 7. GNSS | Que es y para que sirve. WPT, COG, SOG, XTE, ETA, MOB, Datum. |
| 8. Cartas electrónicas | Tipos. Importancia de las cartas en papel. |
| 9. AIS | Que es y para que se usa el AIS. |
Video Tema 3
3. Teoría Navegación.
1. Esfera terrestre.
La tierra es una esfera achatada por los polos. A los efectos de cálculos se considera como una esfera perfecta.
Meridianos, Paralelos (Longitud y Latitud)
Si se corta una esfera pasando por el centro se llama circulo máximo; para cualquier otra situación será un circulo menor.
El Ecuador es la circunferencia máxima perpendicular al eje de la Tierra, y divide a esta en dos mitades llamadas «Hemisferios». Tenemos el hemisferio Norte que contiene el polo Norte, y el hemisferio Sur que contiene el polo Sur.
Los Paralelos son circunferencias menores paralelas al Ecuador. Se denomina paralelo del lugar al aquel que pasa por el punto o el lugar donde se encuentra nuestro barco.
Los paralelos situados a 23º27´ del Ecuador y de los polos reciben un nombre especial. Asi tenemos en el hemisferio Norte a 23º 27´ del polo Norte el circulo polar ártico, y a 23º 27´sobre el ecuador el trópico de Cáncer. Y de forma similar en el Sur encontramos el circulo polar Antártico y el trópico de Capricornio.


El Meridiano de Greenwich sirve como origen y divide la superficie en hemisferio occidental y oriental. O lo que es lo mismo en zona Este y Oeste.
El meridiano es cualquier círculo máximos que pasa por los polos, por tanto perpendicular al Ecuador. La parte visible se denomina meridiano superior, y la opuesta inferior o antimeridiano.
El Meridiano del lugar es el que pasa por el donde se encuentra la embarcación. Se suele dividir por el eje de la tierra en meridiano superior e inferior o antimeridiano.
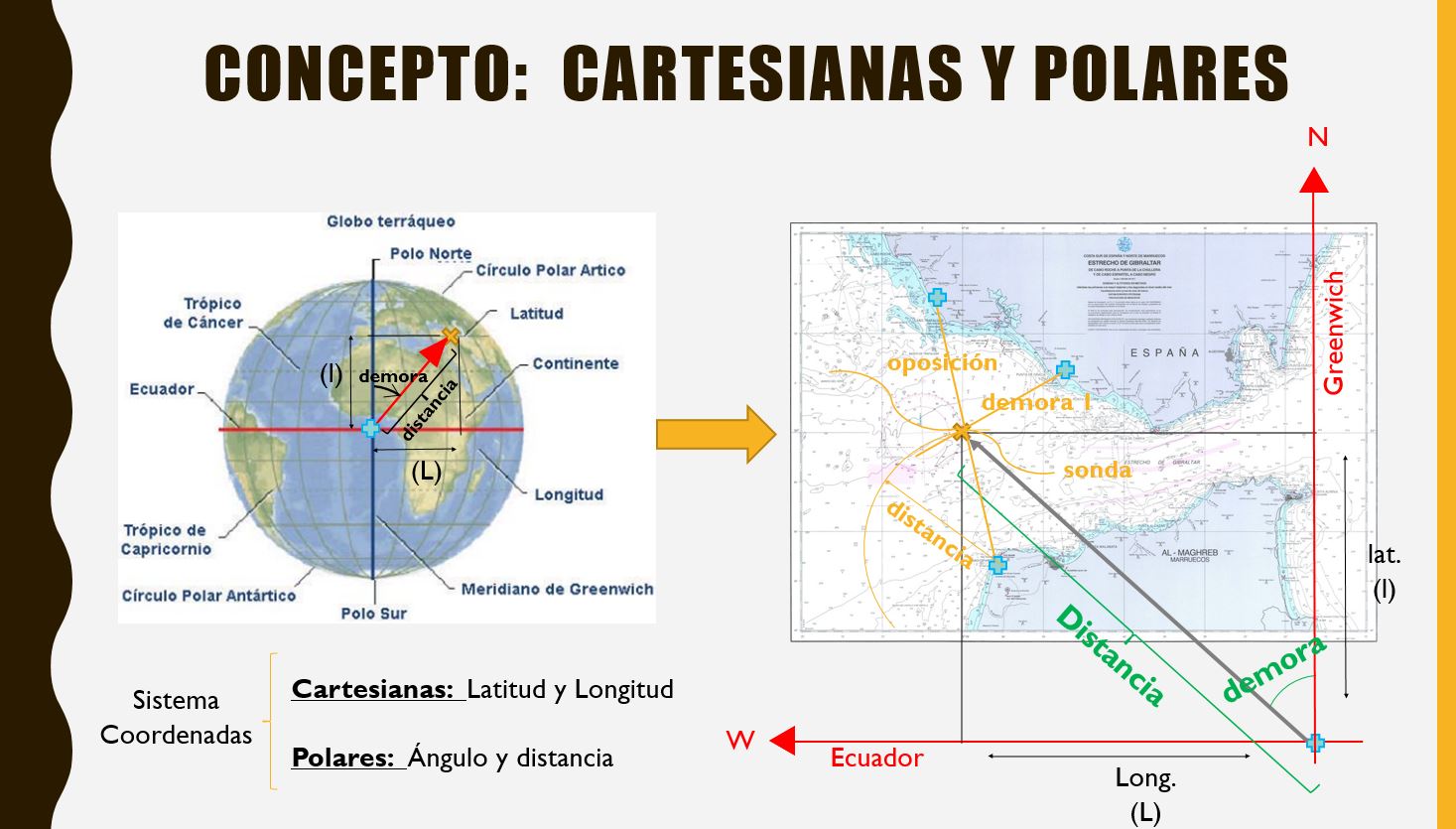
COORDENADAS GEOGRÁFICAS.
Todo punto tiene una situación. Podemos concluir que el punto de intersección entre el Paralelo del Lugar y el Meridiano del Lugar, será el punto en el que nos encontramos y por lo tanto nuestra situación.
Latitud.
Arco del meridiano del lugar desde el Ecuador hasta el paralelo del lugar. Su símbolo es «l» y se expresa como un ángulo (grados, minutos y décimas de minuto). Puede ser N o S, con un valor máximo de 90º. A efectos de cálculo Norte tiene signo + y Sur -.
Longitud.
Arco de Ecuador contado desde el meridiano superior de Greenwich al meridiano superior del lugar. Se representa con la letra «L». Va de 0º a 180º hacia el W o hacia el E. A efectos de cálculos el Oeste ![]() es +, y el Este (E) es -.
es +, y el Este (E) es -.
Las diferencias en latitud o Longitud se hallan restando a las coordenadas del destino las del origen. Si la diferencia es positiva para latitudes el sentido será hacia el Norte, y para Longitudes hacia el Oeste.
REPASO DEL PER.
Correción Total
Es la suma de la declinación magnética de la tierra que aparecerá en todas las cartas con su año de referencia y variación anual. Siempre tendremos que actualizarla al año en curso. Y el desvío que registra la tablilla de desvíos propia de nuestro barco por los elementos metálicos que lo componen.
Rumbo
Es el ángulo formado por la línea popa-proa con el Norte.
- Circular. Entre 0º y 360º desde el N en el sentido de las agujas del reloj.
- Cuadrantal. Desde el polo más próximo (N o S) indicando el sentido. Ej: 160º – > S20E
Vídeo explicativo (clica sobre mi!!)
Los rumbos podrán ser:
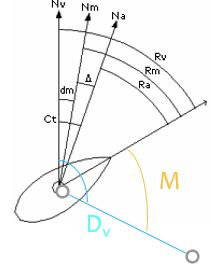
Ra Rumbo de aguja (medido en el compás del barco)
Rm Rumbo magnético (respecto al Nm) Rm = Ra + desvío Rv = Ra + desvío +dm
Rv Rumbo verdadero (respecto al Nv, o geográf.) Rv = Rm + dm Rv = Ra + Ct
Una vez entendido trabajaremos con la fórmula obtenida (Rv=Ra + Ct) para pasar del Ra que mide el patrón en el barco al Rv que es el que se dibuja en las cartas.
Lineas de posición
Las líneas de posición definen el lugar geométrico que cumple determinada condición. Con dos de ellas sacaremos un punto de intersección, un punto común que determina nuestra posición
Al final cuando no tenemos las coordenadas de latitud y longitud se trata de tomar como origen de nuestro sistema de referencia puntos conocidos de la carta y usar la dirección y distancia a nuestro barco, mismo sistema que se usa en los sistemas de coordenadas polares.
Se observaran puntos destacados de la costa (faros, depósitos, picos,…), del fondo (valores redondos marcados en carta: 50m, 100m,…). Por la noche nos valdremos sólo de aquellos elementos con luz como balizas y faros.
Son el resultado de observaciones hechas por el navegante u obtenidas mediante instrumentos. Pueden ser líneas rectas o curvas, o dicho de otra forma direcciones o distancias. Con dos de ellas podremos sacar un punto de corte que será nuestra situación. Distinguimos 4 tipos:
-> Demora
Las demoras en lugar de la proa miden un punto notable de la costa, respecto del norte. Se mide con un compas de demoras (brújula portátil con un pequeño visor donde enfocar el objeto a medir), y de la misma forma que los rumbos tendremos de aguja, magnético y verdadero.
Dv = Da + Ct
Las marcaciones son medidas locales de un punto notable de la costa respecto a la línea de crujía popa-proa, en la práctica apenas se usan, prácticamente sólo para indicar el ángulo del viento. La demora se relaciona con el rumbo por medio de ella. A estribor son positivas y a babor negativas.
D = R + Mº

Estás como los rumbos también pueden ser Dv, Dm, Da. Sobre la carta se trazan las verdaderas. IMPORTANTE: Dibujaremos la demora en lugar con origen en el barco, tomando de origen el faro u objeto visualizado, por lo que trazaremos el valor opuesto.
-> Oposición o Enfilación
Se denomina así al lugar cuando nos encontramos entre dos faros por ejemplo o alineados con ellos. No necesitan ningún instrumento, simplemente observación. Será más precisa una oposición por la facilidad de observar que una enfilación. Por ello estas últimas se usan más como comprobación.
-> Distancia
Lugar concreto a una determinada distancia de un punto. Esta formado por un arco. A veces nos dirán que ubicados sobre una demora de un punto estamos a la distancia mínima de otro punto. Esto determinara nuestra posición trazando una línea perpendicular a la línea de la demora que nos una con el el punto al que estamos a mínima distancia. Las distancias se obtienen mediante el radar.
Recordad las distancias se miden en la escala de latitudes. Una celda grande equivale a 1 milla y cada minicelda son 0,2 millas. Si nos dicen un cable se refieren a 0,1 millas.
-> Veril de sonda
Señalado en la carta con una línea más o menos paralela a la costa indica aquellos puntos que están a la misma profundidad. Se obtienen mediante la sonda.
2. Corrección total. (Se verá en el Tema 4 Apdo 1).
Cálculo por desviación mágnetica y desvío.
Ct = (+- dm) + (+-Δ)
El rumbo o la demora es siempre el mismo, lo que cambia es el Norte de referencia (Nv, Nm, Na).
Cuando el Nm queda a la derecha del Nv, la declinación magnética es positiva (+), de igual forma que cuando el Na queda a la derecha del Nm, el desvío es positivo (+).
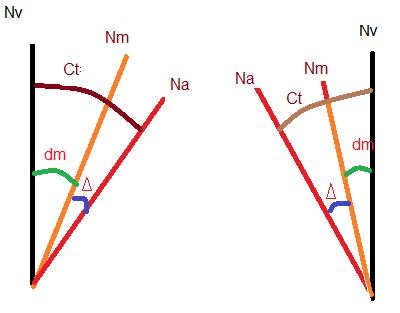
Ct = dm + Δ Ct = -dm + -Δ
Cálculo por la polar.
La estrella polar identifica el Norte verdadero o geográfico, ya que nos marca el Polo Norte. Rv=000º=360º. Por ello, si tomamos Demora de aguja con el compas portátil podremos aplicar la fórmula Ct=Dv-Da
Cálculo por enfilaciones u oposiciones.
La demora la tomamos con nuestro compas portatil obteniendo la Da. Al objeto de trazarla en la carta, deberemos convertirla en Dv sumandole la Ct.
Podemos conocer la Ct si disponemos simultaneamente de la Dv y la Da. Trazada una oposición o enfilación, podemos medir en la carta su Dv, y al momento de observar que pasamos con el barco por la oposición o enfilación medimos la Da, pudiendo despejar la fórmula. Ct = Dv – Da
3. Rumbos. (Se verá en el Tema 4 Apdo 2).
Rumbo es el ángulo formado por la línea proa-popa de nuestro barco con el Norte.
Rumbo verdadero
Es el ángulo que forma el barco con el meridiano verdadero o con el Nv.
Rumbo de aguja
Es el ángulo que forma el barco con el meridiano de aguja o con el Na.
Rv = Ra +- Ct
Rumbo de superficie
El efecto del viento en un barco produce un deslizamiento lateral hacia sotavento (abatimiento), que hace que siga un rumbo que denominamos rumbo de superficie.
Rs = Rv +- Ab
El abatimiento es el ángulo entre el rumbo verdadero y el rumbo de superficie. El abatimiento a estribor será positivo (+) y a babor será negativo (-). Para un viento determinado este varía en función de la obra muerta y obra viva de cada barco. Para contrarrestar el abatimiento bastará con caer a la banda contraria el mismo número de grados que estamos abatiendo.
4. Publicaciones náuticas.
Es muy importante tener las cartas a bordo actualizadas. Para ello nos serviremos de los Avisos a loa Navegantes que detallan todas las variaciones relativas a sondas, naufragios, boyas que han cambiado de posición o cualquier situación que pueda suponer un peligro.
Pueden ser:
- Generales. Información diversa de utilidad. No afecta a una carta en concreto.
- Permanentes. De carácter definitivo.
- Temporales. Limitado en el tiempo, no definitivo.
- Preliminares. Cuando se considera la divulgación anticipada.
Estos avisos a los navegantes se registran en la web de la armada del Instituto hidrográfico de la marina, los más relevantes se transmiten a diario por radio.
5. Medida del tiempo.
El tiempo es una magnitud física que permite ordenar la secuencia de los sucesos. El ser humano se dio cuenta de que podía recurrir a fenómenos físicos que se repetían de forma periódica para construir intervalos de tiempo.
El primer «reloj» fue sin duda el día y la noche. El día podía definirse como el tiempo que tarda la Tierra en dar una vuelta completa sobre su eje de rotación. A su vez el año, es el tiempo que tarda el Sol en recorrer la Eclíptica, la cual no recorre uniformemente, y que llamamos Sol verdadero. Debido a ello los días como medida de tiempo no son iguales. Por ello se tuvo que crear un Sol imaginario llamado «Sol medio» que si describiría arcos iguales en tiempos iguales.
Por tiempo universal (UTC) entendemos una medida del tiempo válida para todos los puntos de la Tierra y referida al meridiano inferior de Greenwich que llamamos Hora Civil en Greenwich. Este es el tiempo transcurrido desde que el Sol medio pasó por el meridiano inferior es decir por 180º.
La Hora Civil del Lugar (HcL) es el tiempo que ha transcurrido desde que el Sol medio pasó por el meridiano inferior del Lugar. Que es lo mismo que, teniendo por referencia las 12h, el tiempo desde que el Sol ha pasado por el meridiano superior del Lugar.
Todos los lugares con diferente Longitud tendrían una hora distinta. Al objeto de evitar este problema se ha establecido la llamada Hora Legal (Hz).
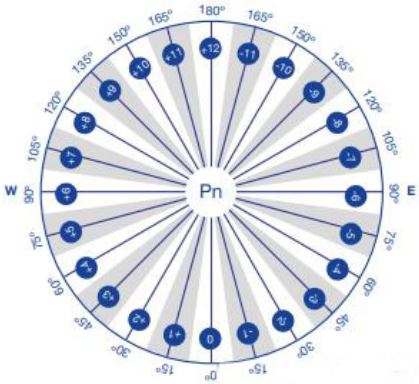
Se ha dividido la superficie terrestre en 24 husos horarios de 15º cada uno equivalentes a 1 hora. 360º : 24h = 15º / h. Todos los lugares dentro de cada Huso tienen la misma hora. Tened en cuenta que el meridiano superior de Greenwich divide al uso 0 en dos partes iguales de 7,5º, y así sucesivamente para cada Huso. Los Husos con Longitud W son (+) y los de Este (-). El Huso +1 expresa que el Sol paso hace 1 hora por el Huso 0, de la misma forma el huso -1 expresa que al Sol le falta 1 hora para llegar al Huso 0, cuyo meridiano central es el meridiano superior de Greenwich.
Hora oficial (Ho) es la que establece el gobierno de una nación para reducir el consumo de energía haciendo coincidir la jornada laboral con el mayor número de horas posibles con luz solar.
En España, la Hora Oficial (Ho) está adelantada de octubre a marzo una hora (UTC +1), y desde finales de marzo hasta finales de octubre dos doras (UTC +2). UTC significa Universal Time Coordinated, o lo que es lo mismo tiempo en el meridiano de Greenwich.
Por último, la Hora del reloj de bitácora (Hrb) es la hora que llevamos a bordo y es igual a la Hora legal (Hz).
6. Radar.
El «Radio Detection and Ranging» (detención y medición de distancia por radio) está basado en ondas electromagnéticas que viajan a la velocidad de la luz. Nos facilita la detección de cuerpos sólidos estáticos o móviles, y nos permite medir la distancia a la que se encuentran, y cual es su demora o su marcación. Nos permite asimismo medir demoras a puntos determinados del litoral y al proporcionarnos también la distancia nos da en último término nuestra situación.
Pueden aparecer interferencias, bien con radares de otros barcos en cuyo caso nos aparecen espirales de puntos con formas que cambian a cada barrido. O bien en caso de mal tiempo provocadas por el oleaje o la lluvia, para lo cual se puede activar unos filtros llamados Sea-clutter y Rain-clutter respectivamente.
Si trabajamos en pantalla con presentación «proa arriba» nuestro cursor de demora sobre el punto elegido nos indicará la marcación. Si trabajamos con presentación «norte arriba» leeremos la demora verdadera.
7. GNSS.
El GNSS (Global Navigation Satélite System) más conocido como GPS permite determinar en cualquier lugar del mundo, la posición de cualquier tipo de objeto equipado con un terminal receptor. El sistema GPS está controlado por Estados Unidos, también existe el sistema GLONASS gestionado por la Federación Rusa, y por último la Unión Europea ha desarrollado uno propio llamado GALILEO.
El sistema GPS está compuesto por 24 satélites que operan en seis planos orbitales. La base del funcionamiento del GPS es la triangulación. Para ello es preciso conocer con gran precisión la distancia a la que se encuentran los satélites de nuestro receptor. Un desfase de tan sólo una millonésima parte de segundo provocaría un error de 300m, ello explica la necesidad de haya una perfecta sincronización entre los relojes atómicos de los satélites y el reloj del terminal receptor.
VOCABULARIO RELACIONADO:
Nuestro terminal GPS nos ofrecerá además de nuestra situación y la hora GMT los siguientes datos:
- COG (Course over ground). Rumbo sobre el fondo o Rumbo efectivo.
- SOG (Speed over ground). Velocidad sobre el fondo o Velocidad efectiva.
- WAYPOINT (WPT). Punto de ruta. Es fundamental planificar la ruta , introduciendo los puntos a seguir, que garanticen que sea segura y libre de cualquier peligro.
- GO TO. Al presionarlos nos proporcionará los siguientes datos para el waypoint seleccionado.
- BRG (Bearing). Demora. Si el COG o Rumbo coincide con la demora es que vamos a rumbo directo.
- TRACK. Hace referencia al mismo tiempo al rastro o estela del camino por el que hemos ido.
- VMG (Velocity made good). Velocidad de aproximación, de enorme importancia cuando navegamos a vela. A veces haciendo un bordo que se navega a más velocidad se aproxima uno más rápido al destino que yendo de forma directa pero a menor velocidad.
- DTP (Distance to point). Distancia en millas a nuestra meta.
- TTG (Time to go). Tiempo estimado
- ETA (Estimated Time Arrival). Hora de llegada.
- XTE (Cross Track Error). Distancia a la que nos encontramos de la ruta directa, indicándonos con uns «L» (Left) o una «R» (Right).
Gracias al GPS también podemos programar una serie de alarmas entre las que destacamos la de fondeo y el hombre al agua. La primera detecta si cambia nuestra posición, sinónimo de garreo. Y la segunda al presionar el botón para su activación memoriza las coordenadas, lo cual puede ser vital para rescatar al naufrago.
DATUM
Podemos definir el Datum, como un modelo matemático que permite la representación de un punto en el mapa. Para las distintas zonas del planeta, en función de sus características oreográficas, existirán diferentes Datums asociados.
El Datum de referencia más usado en los GPS es el WGS-84 (World Geodetic System de 1984.
8. Cartas electrónicas.
Un plotter es un representador gráfico o pantalla en la que pueden visualizarse las cartas náuticas electrónicas.
Las últimas novedades en equipos electrónicos ofrecen equipos multifunción que combinan cartas con el GPS, equipos de navegación (Corredera y medidor viento) e incluso incorporan Radar y sonda de forma simultanea o mediante el uso de diferentes pantallas.
Hay dos sistemas de presentación cartográfica:
- Los sistemas de información y presentación de la carta electrónica ECDIS – Electronic Chart Display and Information System-, que cumplen las prescripciones OMI/SOLAS. Son un equivalente legal a a actual obligación de llevar a bordo las cartas náuticas en papel.
- Los sistemas de Carta electrónica, ECS – Electronic Chart System- que no cumplen los requisitos OMI/SOLAS.
9. Automatic Identification System (AIS).
El AIS utiliza un sistema de transmisión de datos, en el que el GPS es esencial. Usa la banda VHF y basa su funcionamiento en la utilización de transpondedores automáticos instalados a bordo. El alcance depende de la altura de la antena y oscila entre 10 y 70 millas.
Modos de funcionamiento del AIS:
- De buque a buque.
- De buque a autoridades competentes en la zona.
- De buque a centro de control. Integrando un sistema de gestión de tráfico.
Las principales ventajas son que permite ver sobre una pantalla las embarcaciones a nuestro alrededor con una alcance mayor al del radar conociendo además muchos datos identificativos además de su rumbo y velocidad. Los datos son desplegados sobre cartografia electrónica.
Test 3. Teoría de navegación
